- 烈焰私服





探索外星的机器人要有什么本领?
-
Kolvenbach在公开发表的文章中表示,跳跃式的“动态行走”允许机器人同时四脚离地,可以代替“步态行走”。
为了更好地解决这些问题,SpaceBok的研究团队采用了有缓冲作用的腿部,来进行加速和减速,且能实现对落地能量的储存,以及起跳时的能量释放,这还减少了机器人的自身能量消耗。
今年7月,一款名叫SpaceBok的跳跃机器人,开始在欧洲航天局(ESA)进行测试。这款机器人的设计初衷,就是为了让其能够更高效地在月球或其他低重力小行星上前进。
但总有一些地貌复杂的地区,轮式车辆无法抵达,,这就凸显出了SpaceBok的优点。

因为其他星球上的重力与地球上并不相同。以月球为例,其重力只有地球上的约六分之一。当宇航员阿姆斯特朗和奥尔德林跟随阿波罗11号首次登上月球时,首先要学习的是如何走路。
拟态动物的机器人越来越多。例如,以波士顿动力公司为首研制的人形机器人在飞速进步。但如果要在其他星球上使用,机器人会是什么样子呢?
SpaceBok在一个轨道机器人身上滑动,由此来模仿小行星上的低重力情况。图片来源:欧洲航天局
本文引用地址:
首先要考虑的问题是,机器人如何在外星球上更快速、高效地前进。
“月球的重力只有地球的六分之一,在这种情况下,SpaceBok的跳跃高度可能高达2米,再落地时就需要更好地稳定自己。”Dietsche说。
Hendrik Kolvenbach和SpaceBok机器人。图片来源:欧洲航天局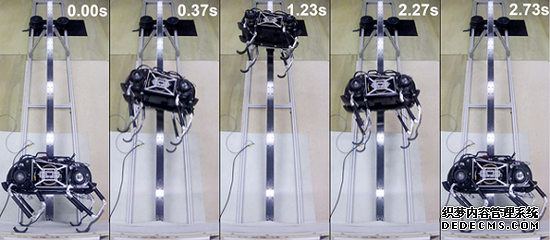
SpaceBok由苏黎世联邦理工学院和苏黎世应用科技大学的学生研制,主要特点是有四条腿,可以像羚羊一样跳跃行走。
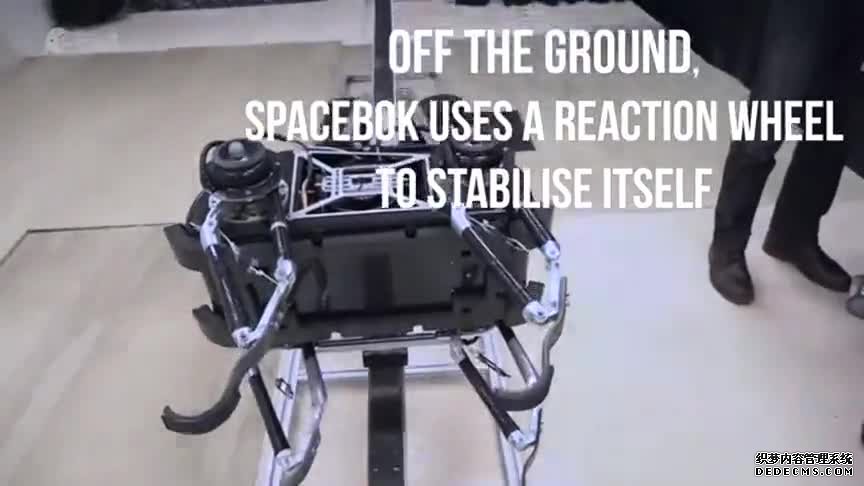
研究团队成员Alexander Dietsche指出,在低重力的条件下,宇航员下意识地跳起,落地时可以自主掌握平衡,机器人却很难做到这一点。
目前,类似于“勇气号”、“好奇号”等火星探测器,使用前进方式的均为车轮式,这种方式较为传统,可靠性更高。
SpaceBok系安全绳进行跳跃试验。图片来源:欧洲航天局研究人员发现,相比较于地面上的正常步行,跳跃的方式更适合机器人在月球等低重力星球上前进。
但想要在机器人身上实现跳跃式的“动态行走”,并不容易。Kolvenbach表示,这需要更高的计算能力和算法。

【工业之美】探索外星的机器人要有什么本领?首先从不好好“走路”做起
苏黎世联邦理工学院机器人系统实验室的博士生Hendrik Kolvenbach带领的学生团队,一直致力于研究此类机器人,他们的设计均基于模仿鹿或羚羊类动物,研究的重点是让这类机器人如何在特定情况下快速移动。
截至目前,SpaceBok的测试均采用系着安全带的跳跃试验。除正常的实验室条件测试外,团队也在欧洲航天局的火星试验场进行了测试,那里有类似于火星表面的不规则平面。